NEW FEATURES IN CRISP ver 5
- New enhanced material models interface
CRISP has always been aimed to allow users and research students to add their own constitutive soil models. The FE engine is built specifically to allow easy compilation of Fortran subroutines for modeling new material models. In addition, the graphical user interface uses a simplified method of loading the material models parameters via a text table. The models are listed in the material models menu of the pre-processor. Any extra soil model, correctly linked in the FE engine, can now be added to the list of material models via the file CRISPMAT.DAT
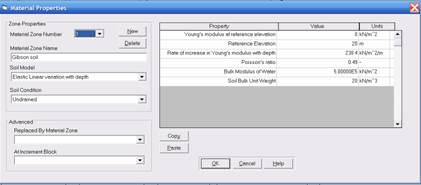
The new material models menu allows easy addition of new soil model subroutines into CRISP.
- Iterative solution using full Newton Raphson method, with force and displacement norms check.
CRISP solves problems which use the elasto-plastic models using the full Newton-Raphson tangential stiffness method. A force norm check is added in version 5 which allows for checking the force norms as well as the displacement norms.
Displacements norm: if the nodes move by less than a certain amount between iterations, then it is assumed that it is not going to move much more and hence has converged. The tolerance for the solver is the norm of the incremental displacements in the current iteration divided by the norm of the total displacements so far.
Residual forces norm: if the out-of-balance forces at the end of the current iteration are less than a certain amount, then it is assumed that the deformed mesh is in equilibrium. The tolerance for the solver is the norm of the current out-of-balance forces divided by the norm of all the externally applied forces.

- Selective Integration using the B-Bar method
In the analysis of incompressible materials (materials with Poisson’s ratio =0.49, undrained problems, or plastic zones), an overstiff response has been observed in many cases. The ideal solution for elements which suffer from incompressibility constraints is to break up the stiffness matrix into two parts, one dilatational and one deviatoric. It is the dilatational part which produces the overstiff response. This part can then be integrated using a lower order integration rule. This method is called selective integration method.
This method is also explained in this link.
- New examples
New examples have been added in CRISP 5. These aim to demonstrate the mesh generating features in CRISP, especially the structured mesh generation feature with flexible mesh refinement for zones of large stress change (ie re-entrant corners). A typical example for a footing on cohesive soil is demonstrated in this link
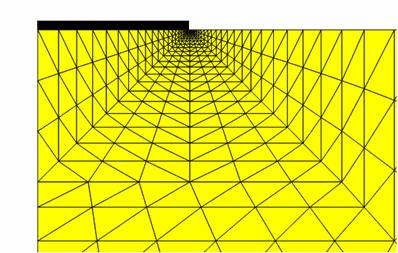
Example of a footing using structured mesh with flexible mesh refinement
- Cyclic loading model based on Cam-Clay
This is a simple soil model which provides a reasonable prediction of behaviour of clays under repeated loading. The model is based on the work of Carter, Booker and Wroth (1982). The model is based on the existing Modified Cam Clay model with the addition of one more parameter which characterizes cyclic behaviour. This parameter may be determined by performing cyclic triaxial tests under undrained conditions. A typical stress path response due to cyclic loading is presented here
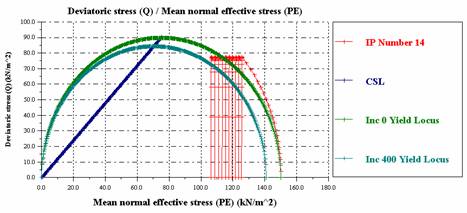
The Cyclic MCC model is also detailed in this link